-40%






DS9180 Torque Alloy Servo 12V/24V/ 110kg-180kg/cm for Large Robot Mechanical Arm
$ 25.02
- Description
- Size Guide
Description
Product Description:- 180kg.cm:1 cm mechanical arm can lift 180kg heavy weights.
- If the mechanical arm is 1 meter,it can lift 1.8kg weights in theoretical calculation.
- Digital servo,sensitivity response,long travel distance,zero dead area
- Compatible with Futaba,JR,SANWA,Hitec remote control system.
- Special power constant technology,ensure servo continously working.
- Once the servo fused,the servo can not work.The servo keeps the servo working in the safety torque,never dropping.
Technology parameter:
- Working voltage:12V~24V (DC)
- No load rotation current:<500mA
- The max torque:180kg.cm(24V) (actual,not theoretical value)
- 1764N.cm(24V) (actual,not theoretical value)
- 90kg.cm(12V) (actual,not theoretical value)
- 882N.cm(12V) (actual,not theoretical value)
- Angle speed:0.5s/60°(rotate 60 degree need 0.5s) 24V;1.0s/60°(rotate 60 degree need 1.0s),12V.
- Rotation angle:300°MAX.The largest travel distance:300 degree(0~300°electronic limit,adjustable)
- Input mode:Pulse signal (remote controller,singlechip) or analog voltage signal (potentiometer)
- Pulse signal input range:0.5ms-2.5ms,apply to all "multi-channel servo controller","1ms-2ms aeromodelling remote controller","singlechip programming","Arduino".
- Voltage signal input range:0V~+5V
- Control accuracy:0.32°
- Weight:530g
- Gear material:steel
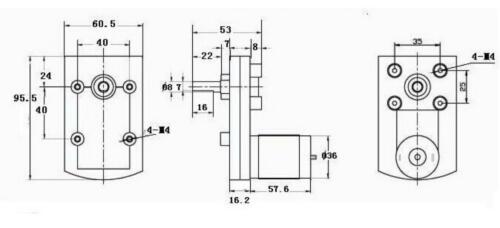
- Outline sizeL95.5mm X 60.5mm X 102.6mm
- Power input:12V-24Vdc (- connect negative pole,+connect positive pole)
- Motor output:M-connect motor negative pole,M+ connect motor positive pole.
- Motor rotation adjustment input:used for controlling angular velocity.
- Angular velocity adjustment input:used for controlling angle range.
Mode option:Jumper cap setting pulse signal input or analog voltage signal input.PPM is pulse signal input,POT is analog voltage signal input.
- Analog control mode:angle input signal is analog quantity ,you can control motor out shaft angle position with potentiometer.
- Digital control mode:angle input signal is digital square wave signal,pulse width is 0.5ms-2.5ms or 1ms-2ms.
Package List:
- 1 x Servo
- 1 x 20cm Signal cable (not arm horn)